|
libfranka 0.15.0
FCI C++ API
|
|
libfranka 0.15.0
FCI C++ API
|
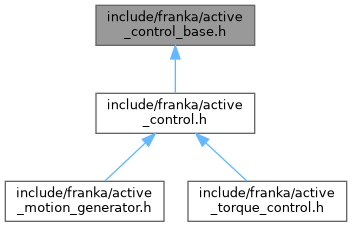
Abstract interface class as the base of the active controllers. More...
#include <franka/control_types.h>#include <franka/exception.h>#include <franka/robot_state.h>#include <memory>#include <optional>#include <utility>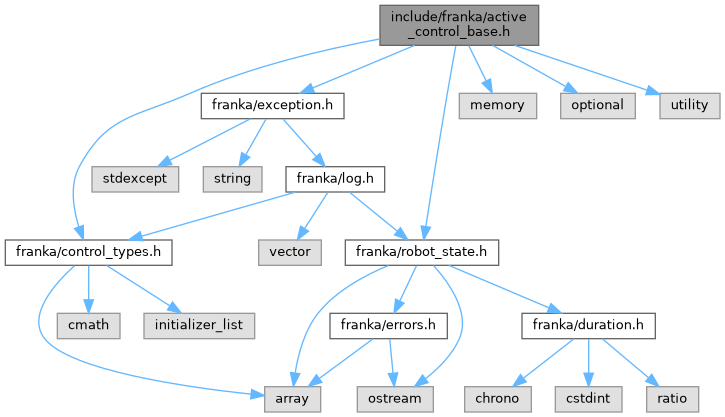
Go to the source code of this file.
Classes | |
| class | franka::ActiveControlBase |
| Allows the user to read the state of a Robot and to send new control commands after starting a control process of a Robot. More... | |
Abstract interface class as the base of the active controllers.
