|
libfranka 0.15.0
FCI C++ API
|
|
libfranka 0.15.0
FCI C++ API
|
Contains model library types. More...
#include <array>#include <memory>#include <franka/robot.h>#include <franka/robot_model_base.h>#include <franka/robot_state.h>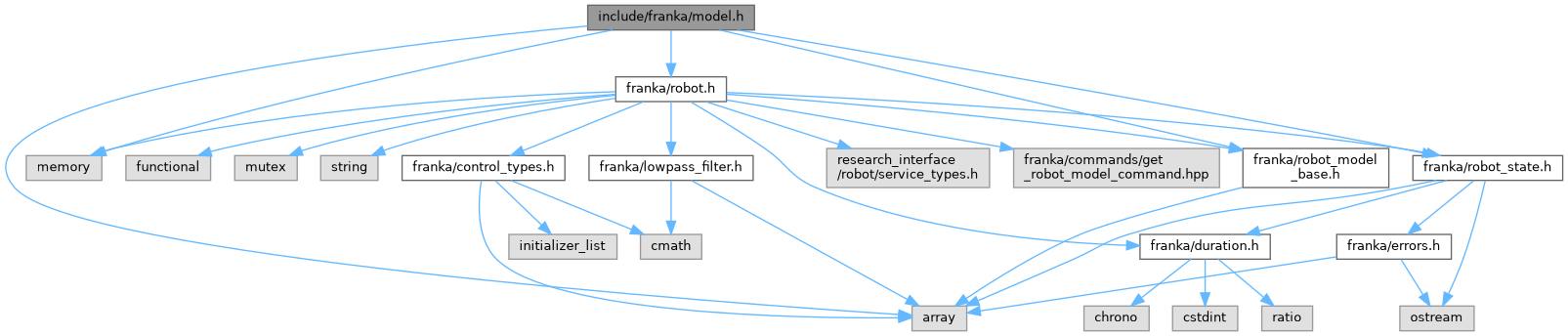
Go to the source code of this file.
Classes | |
| class | franka::Model |
| Calculates poses of joints and dynamic properties of the robot. More... | |
Enumerations | |
| enum class | franka::Frame { kJoint1 , kJoint2 , kJoint3 , kJoint4 , kJoint5 , kJoint6 , kJoint7 , kFlange , kEndEffector , kStiffness } |
| Enumerates the seven joints, the flange, and the end effector of a robot. | |
Functions | |
| Frame | franka::operator++ (Frame &frame, int) noexcept |
| Post-increments the given Frame by one. | |
Contains model library types.
|
noexcept |
Post-increments the given Frame by one.
For example, Frame::kJoint2++ results in Frame::kJoint3.
| [in] | frame | Frame to increment. |
