|
libfranka 0.15.0
FCI C++ API
|
Loading...
Searching...
No Matches
|
libfranka 0.15.0
FCI C++ API
|
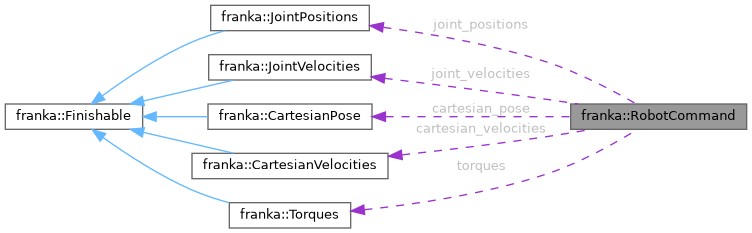
Command sent to the robot. More...
#include <log.h>
Public Attributes | |
| JointPositions | joint_positions {0, 0, 0, 0, 0, 0, 0} |
| \(q_d\) sent to the robot. | |
| JointVelocities | joint_velocities {0, 0, 0, 0, 0, 0, 0} |
| \(\dot{q}_d\) sent to the robot. | |
| CartesianPose | cartesian_pose {1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1} |
| \(^O{\mathbf{T}_{EE}}_{d}\) sent to the robot. | |
| CartesianVelocities | cartesian_velocities {0, 0, 0, 0, 0, 0} |
| \(^O\dot{P}_{EE}\) sent to the robot. | |
| Torques | torques {0, 0, 0, 0, 0, 0, 0} |
| \({\tau_J}_d\) sent to the robot. | |
Command sent to the robot.
Structure used only for logging purposes.