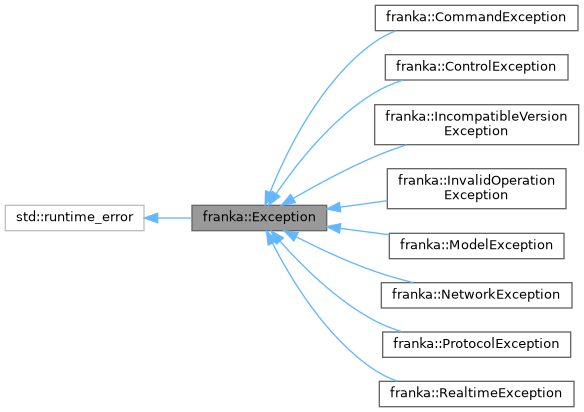
Base class for all exceptions used by libfranka.
More...
#include <exception.h>
Base class for all exceptions used by libfranka.
- Examples
- cartesian_impedance_control.cpp, communication_test.cpp, echo_robot_state.cpp, generate_cartesian_pose_motion.cpp, generate_cartesian_pose_motion_external_control_loop.cpp, generate_cartesian_velocity_motion.cpp, generate_cartesian_velocity_motion_external_control_loop.cpp, generate_consecutive_motions.cpp, generate_elbow_motion.cpp, generate_joint_position_motion.cpp, generate_joint_position_motion_external_control_loop.cpp, generate_joint_velocity_motion.cpp, generate_joint_velocity_motion_external_control_loop.cpp, grasp_object.cpp, joint_impedance_control.cpp, joint_point_to_point_motion.cpp, motion_with_control.cpp, motion_with_control_external_control_loop.cpp, print_joint_poses.cpp, and vacuum_object.cpp.
The documentation for this struct was generated from the following file: