Troubleshooting
Hint
Checkout the Franka Community and the franka_matlab category for relevant posts or for creating new ones!
control_modes.h: No such file or directory error.
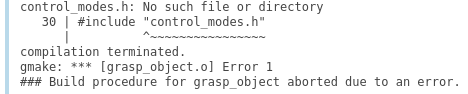
The build error message in simulink when only the “apply control is present”.
This is a known current limitation of the system, as the build process will fail if only the “apply control” block is present in a simulink model.
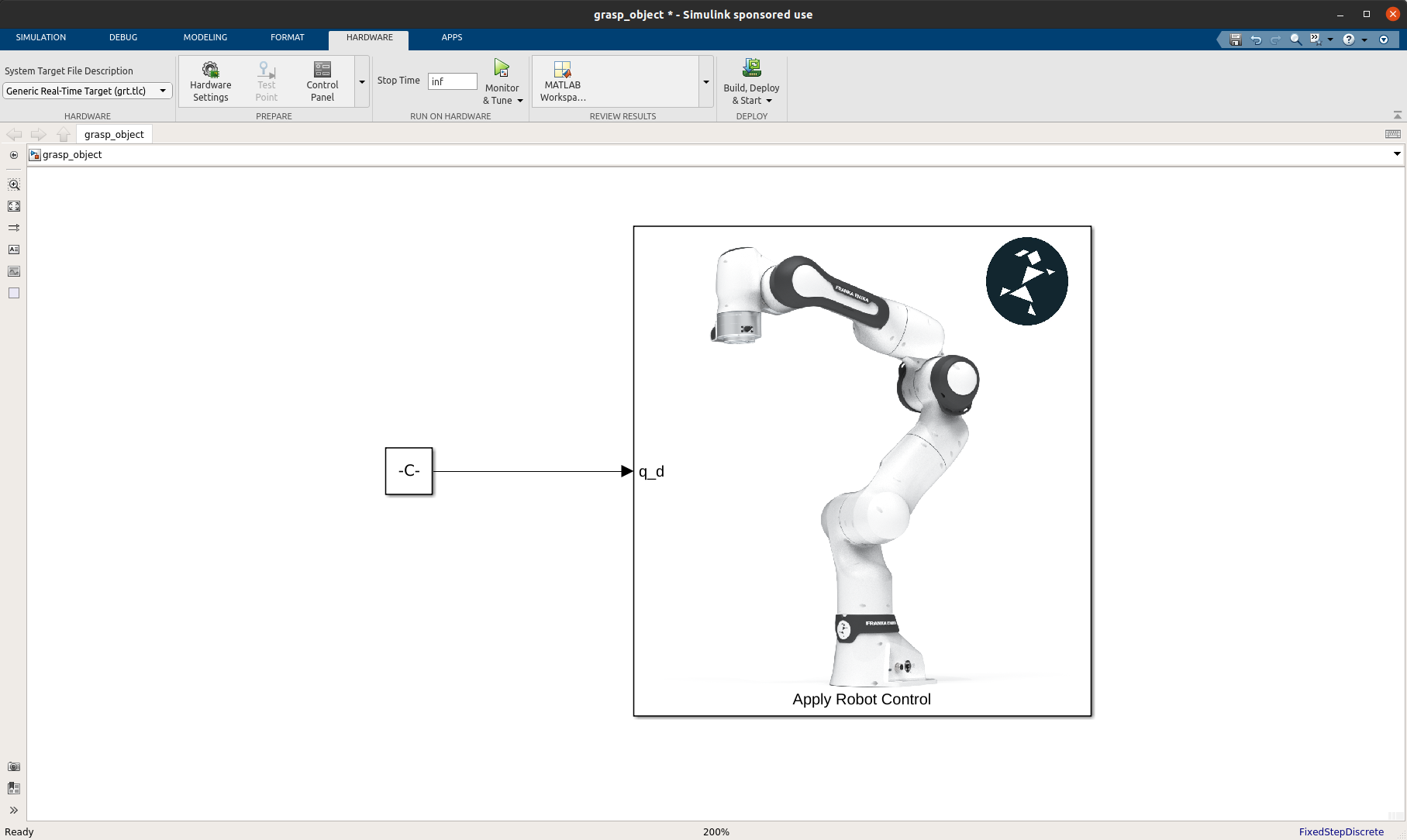
Example of a Simulink model with only “apply control”. The build will fail.
For fixing the issue just include any other block from the Franka Simulink Library, e.g with the terminal if it will be left unused.
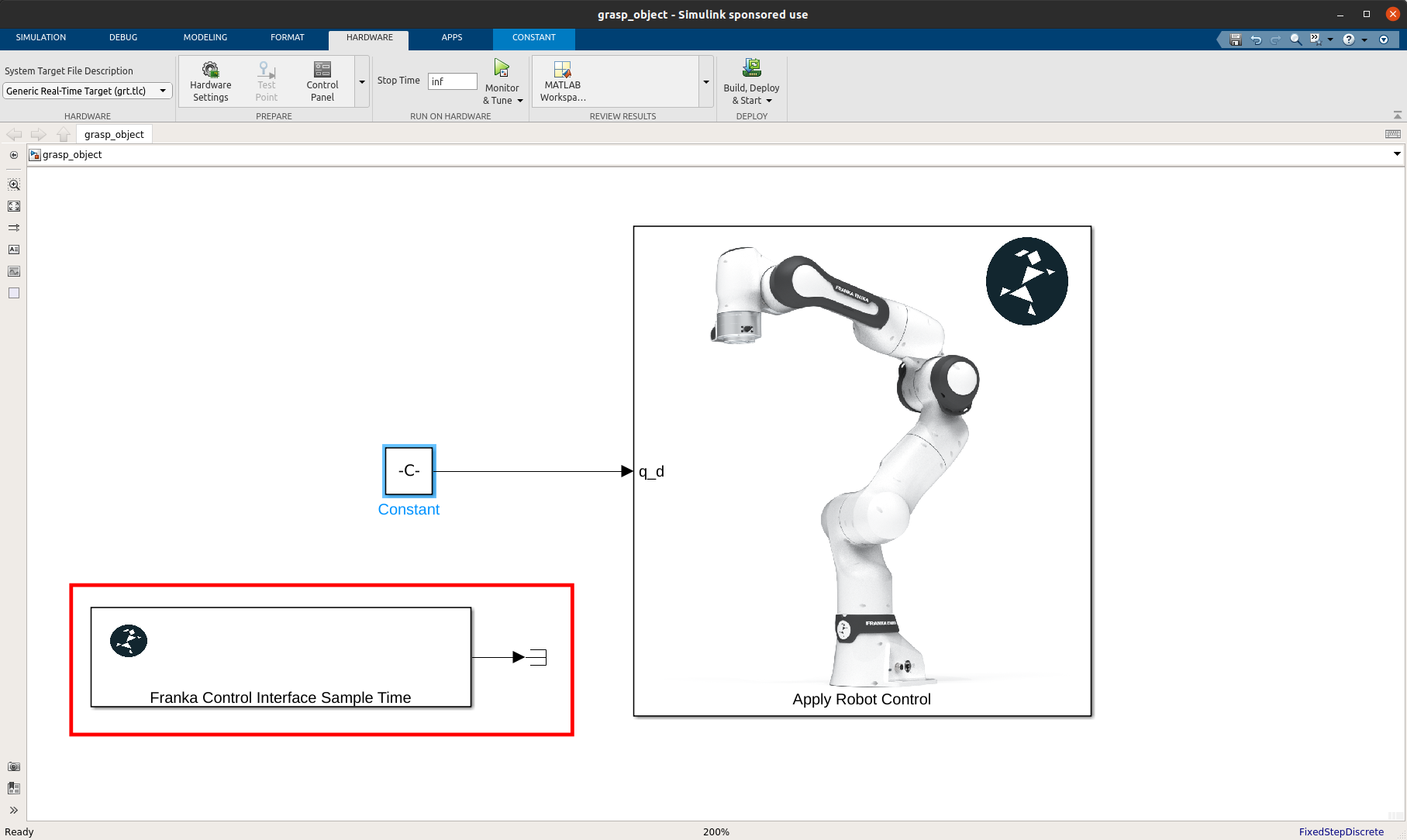
Fixing the “control_modes.h: No such file or directory error.” by including any other block from the Franka Simulink Library.
missing “MW_custom_RTOS_header.h”
When working with the AI Companion or a NVIDIA Jetson platform, if you encounter an error releated to missing “MW_custom_RTOS_header.h”, you can try forcing the NVIDIA Simulink Code Generation settings to reset:
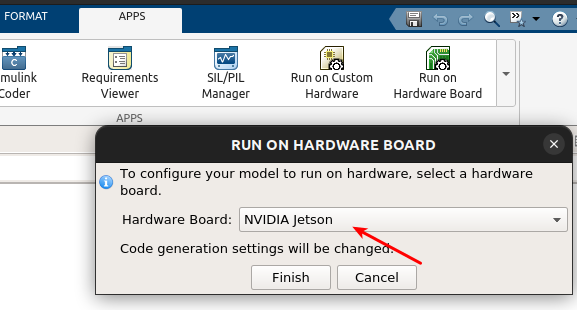
Fixing the “missing MW_custom_RTOS_header.h” error by forcing the Simulink Jetson related settings to reset.
libfranka reference
Hint
Same error messages and advised troubleshooting applies as libfranka.
Issues with the graphics driver in Linux
NVIDIA’s graphics driver’s are not officially supported in Linux with Real-Time Kernel. This could cause issues in graphics renderings in Matlab and Simulink, e.g with figures and scopes respectively. We would then recommend starting matlab with the -softwareopengl for avoiding these issues:
$ matlab -softwareopengl
Issues with libstdc++.so and other system dynamic libraries
Make sure that you have installed the matlab-support package for your system, in order for Matlab to reference the system dynamic libraries instead of the precompiled ones that it ships with:
sudo apt install matlab-support
Franka Simulink library number of block instances
Important
The Simulink library has been designed for rapid-prototyping of robot controllers with one-robot in mind. Multiple instances for the Apply Control block are not encouraged as this has not been tested. Multiple instances of all the other Simulink blocks, as long as they point to the same robot ip, can be utilized.